“端到端”的風(fēng)正在席卷中國(guó)智駕行業(yè)。
進(jìn)入 2024 年下半年,如果有車企談智能駕駛時(shí)不談“端到端”,那大概率會(huì)被視為落后了。
7月5日,理想汽車發(fā)布了基于端到端模型、VLM 視覺(jué)語(yǔ)言模型和世界模型的全新自動(dòng)駕駛技術(shù)架構(gòu)。這基本是理想汽車端到端路徑的一次方法論輸出,較為完整地呈現(xiàn)出理想智駕下一步發(fā)展路徑。
在虎嗅汽車看來(lái),此次發(fā)布有三大值得關(guān)注的焦點(diǎn)——理想的“端到端”和其它玩家的有何不同?理想的智駕研發(fā)到了什么程度?以及,理想為何在此時(shí)強(qiáng)調(diào)智駕技術(shù)能力?
相較華為,理想方案更為激進(jìn)
先看理想全新的自動(dòng)駕駛技術(shù)架構(gòu)。其受諾貝爾獎(jiǎng)得主丹尼爾·卡尼曼的快慢系統(tǒng)理論啟發(fā),在自動(dòng)駕駛領(lǐng)域模擬人類的思考和決策過(guò)程,采用了“快系統(tǒng)”和“慢系統(tǒng)”進(jìn)行協(xié)同。
快系統(tǒng),即系統(tǒng) 1,善于處理簡(jiǎn)單任務(wù),是人類基于經(jīng)驗(yàn)和習(xí)慣形成的直覺(jué),足以應(yīng)對(duì)駕駛車輛時(shí) 95% 的常規(guī)場(chǎng)景。
慢系統(tǒng),即系統(tǒng) 2,是人類通過(guò)更深入的理解與學(xué)習(xí),形成的邏輯推理、復(fù)雜分析和計(jì)算能力,在駕駛車輛時(shí)用于解決復(fù)雜甚至未知的交通場(chǎng)景,占日常駕駛的約 5%。
在這一架構(gòu)原型下,系統(tǒng) 1 由端到端模型實(shí)現(xiàn),通過(guò)接收傳感器輸入,并直接輸出行駛軌跡用于控制車輛。系統(tǒng) 2 由 VLM 視覺(jué)語(yǔ)言模型實(shí)現(xiàn),其接收傳感器輸入后,經(jīng)過(guò)邏輯思考,輸出決策信息給到系統(tǒng) 1。雙系統(tǒng)構(gòu)成的自動(dòng)駕駛能力將在云端利用世界模型進(jìn)行訓(xùn)練和驗(yàn)證。
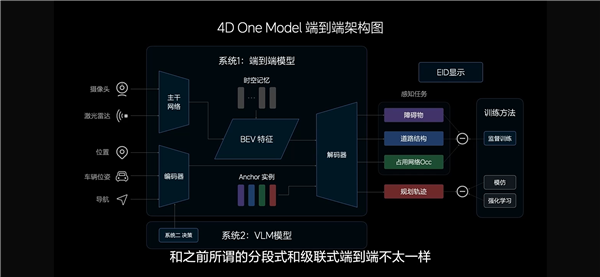
據(jù)理想的說(shuō)法,其系統(tǒng) 1 的端到端模型采用的是 One Model 方案,主要由攝像頭和激光雷達(dá)構(gòu)成,多傳感器特征經(jīng)過(guò) CNN 主干網(wǎng)絡(luò)的提取、融合,投影至 BEV 空間。
另外理想在輸入端還加入了車輛狀態(tài)信息和導(dǎo)航信息,經(jīng)過(guò) Transformer 模型的編碼,與 BEV 特征共同解碼出動(dòng)態(tài)障礙物、道路結(jié)構(gòu)和通用障礙物,并規(guī)劃出行車軌跡。
相較于華為、小鵬等廠商采用的是分段式端到端方案,理想采用的 One Model 方案更為激進(jìn)。特斯拉同樣是 One Model 方案,但其“輸入圖像、輸出控制”的方案比理想的“輸入傳感器信息、輸出行駛軌跡”更進(jìn)一步。
需要指出的是,目前各家廠商在端到端上采用不同的路徑只是選擇上的差異,并無(wú)優(yōu)劣之分。(關(guān)于端到端的技術(shù)原理,虎嗅汽車團(tuán)隊(duì)曾在《特斯拉,要跟華為開(kāi)戰(zhàn)了》一文中有過(guò)詳細(xì)解析)
理想這套架構(gòu)的特別之處其實(shí)是系統(tǒng) 2,其基于的 VLM 視覺(jué)語(yǔ)言模型的算法架構(gòu)由一個(gè)統(tǒng)一的 Transformer 模型組成,將 Prompt(提示詞)文本進(jìn)行 Tokenizer(分詞器)編碼,并將前視相機(jī)的圖像和導(dǎo)航地圖信息進(jìn)行視覺(jué)信息編碼,再通過(guò)圖文對(duì)齊模塊進(jìn)行模態(tài)對(duì)齊,終統(tǒng)一進(jìn)行自回歸推理,輸出對(duì)環(huán)境的理解、駕駛決策和駕駛軌跡,傳遞給系統(tǒng) 1 輔助控制車輛。
在實(shí)際場(chǎng)景中,如果系統(tǒng)二發(fā)現(xiàn)行駛過(guò)程中地面路面非常坑洼不平時(shí)候,其會(huì)給系統(tǒng) 1 發(fā)一個(gè)降速的提醒,并告知駕駛員前方的坑洼路車輛將慢速行駛,減少顛簸;又或者是能夠識(shí)別公交車道的位置以及辨別潮汐車道等。
用理想的話說(shuō),系統(tǒng) 2 相當(dāng)于副駕坐了個(gè)駕校的教練時(shí)刻監(jiān)督駕駛行為。值得一提的是,小鵬的大語(yǔ)言模型 XBrain、毫末的自動(dòng)駕駛語(yǔ)義感知大模型也有類似能力。
據(jù)悉,理想的 VLM 模型參數(shù)量達(dá)到 22 億,VLM 模型在車端的推理時(shí)間也從 4.1 秒優(yōu)化至 0.3秒。
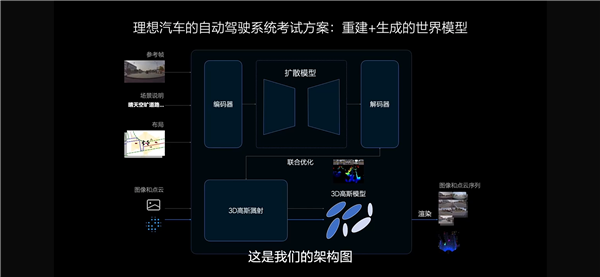
雙系統(tǒng)之外,理想還介紹了端到端方案的測(cè)試和驗(yàn)證方法。業(yè)內(nèi)主流的做法是通過(guò) 3D 虛擬環(huán)境、重建式仿真、生成式仿真等進(jìn)行仿真測(cè)試。理想的做法則是結(jié)合了重建仿真和生成仿真兩種技術(shù)路徑,相當(dāng)于做了重建的真題和生成的模擬題。
事實(shí)上,特斯拉也利用了大模型生成連續(xù)視頻,打造 World Model 即世界模型;自動(dòng)駕駛公司 Wayve 的自動(dòng)駕駛大模型 GAIA-1(已擁有 90 億個(gè)參數(shù))也同樣可以生成駕駛場(chǎng)景視頻,描述場(chǎng)景以及做出預(yù)測(cè)。
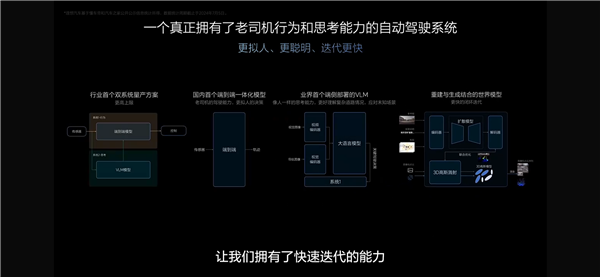
總的來(lái)看,理想的技術(shù)架構(gòu)是在車端布局雙系統(tǒng),ONE Model 的端到端模型讓其自動(dòng)駕駛系統(tǒng)擁有了像人類老司機(jī)的行為能力;VLM 模型能夠讓自動(dòng)駕駛系統(tǒng)擁有像人類一樣的邏輯思考能力;而世界模型則是提供了學(xué)習(xí)和考試的環(huán)境,擁有快速迭代的能力。
據(jù)理想智能駕駛負(fù)責(zé)人郎咸朋透露,其端到端方案從去年下半年就在內(nèi)部孵化并啟動(dòng)預(yù)研,目前已經(jīng)完成了模型的原型驗(yàn)證和實(shí)車的部署。
不過(guò),這一方案還難以交付給用戶,理想在本月給 AD Max 用戶的,是推送無(wú)圖 NOA 方案。
智能駕駛迎來(lái)超車時(shí)刻
“端到端”正在成為各家廠商智能駕駛追逐戰(zhàn)的重要方向。
今年 3 月,元戎啟行能夠?qū)⒍说蕉四P统晒ι宪嚕蝗A為在 4 月發(fā)布乾崑 3.0 時(shí)就表示技術(shù)轉(zhuǎn)向 GOD/PDP 網(wǎng)絡(luò)全新架構(gòu),實(shí)現(xiàn)預(yù)決策規(guī)劃一張網(wǎng);小鵬 5 月在 AI DAY 上宣布端到端大模型已經(jīng)量產(chǎn)上車。另外,包括蔚來(lái)、小米、小鵬等廠商都對(duì)智駕團(tuán)隊(duì)進(jìn)行了調(diào)整以開(kāi)展端到端的布局。
可以看到,包括特斯拉在內(nèi)的各家廠商在端到端技術(shù)方向上目前都處在探索當(dāng)中,盡管在方案、路徑上的選擇各有不同,但可以肯定的是,端到端已經(jīng)成為智駕前進(jìn)的方向。
不過(guò),端到端會(huì)放大智駕系統(tǒng)的上限與下限,其能夠帶來(lái)智駕能力提升的同時(shí),也帶來(lái)的難以解決的安全問(wèn)題,端到端是一個(gè)神經(jīng)網(wǎng)絡(luò)黑箱,其不可解釋性帶來(lái)了一部分安全隱患。
在各家爭(zhēng)相布局之際,理想是首個(gè)公開(kāi)端到端技術(shù)方案的車企,李想本人上個(gè)月在重慶論壇就公開(kāi)了兩大系統(tǒng)的做法引起了業(yè)內(nèi)熱議,此次更是將全套技術(shù)架構(gòu)方案公示,可謂是趁熱打鐵。
考慮到理想在下半年不會(huì)有新品發(fā)布,其率先在智駕能力上的輸出既能讓企業(yè)保持熱度,或也有維持其現(xiàn)有產(chǎn)品競(jìng)爭(zhēng)力的考量。另外,端到端技術(shù)路徑的布局也給了理想在智駕能力上追趕的機(jī)會(huì)。
相較于華為、小鵬等采用分段式端到端做法,理想的端到端模型實(shí)現(xiàn)難度更大,其從PPT到走向量產(chǎn)落地要耗時(shí)多久,效果如何,還需要保持觀察。
根據(jù)辰韜資本發(fā)布的《端到端自動(dòng)駕駛行業(yè)研究報(bào)告》,國(guó)內(nèi)自動(dòng)駕駛公司的模塊化端到端方案上車量產(chǎn)時(shí)間可能會(huì)在 2025年。是騾子是馬,明年就到了拉出來(lái)遛遛的時(shí)候了。
本文鏈接:http://www.bbbearmall.com/news-130617.html理想加入“端到端”競(jìng)賽:雖只是PPT